Table of Contents
Previous: Lab 2
Prelab
We use two sensors because don't have great sample rate per TOF, so we make up for it with more samples. But because both sensors have the same default I2C address, we must include an additional connection to shut off one TOF while we modify the I2C address of the other, like so:
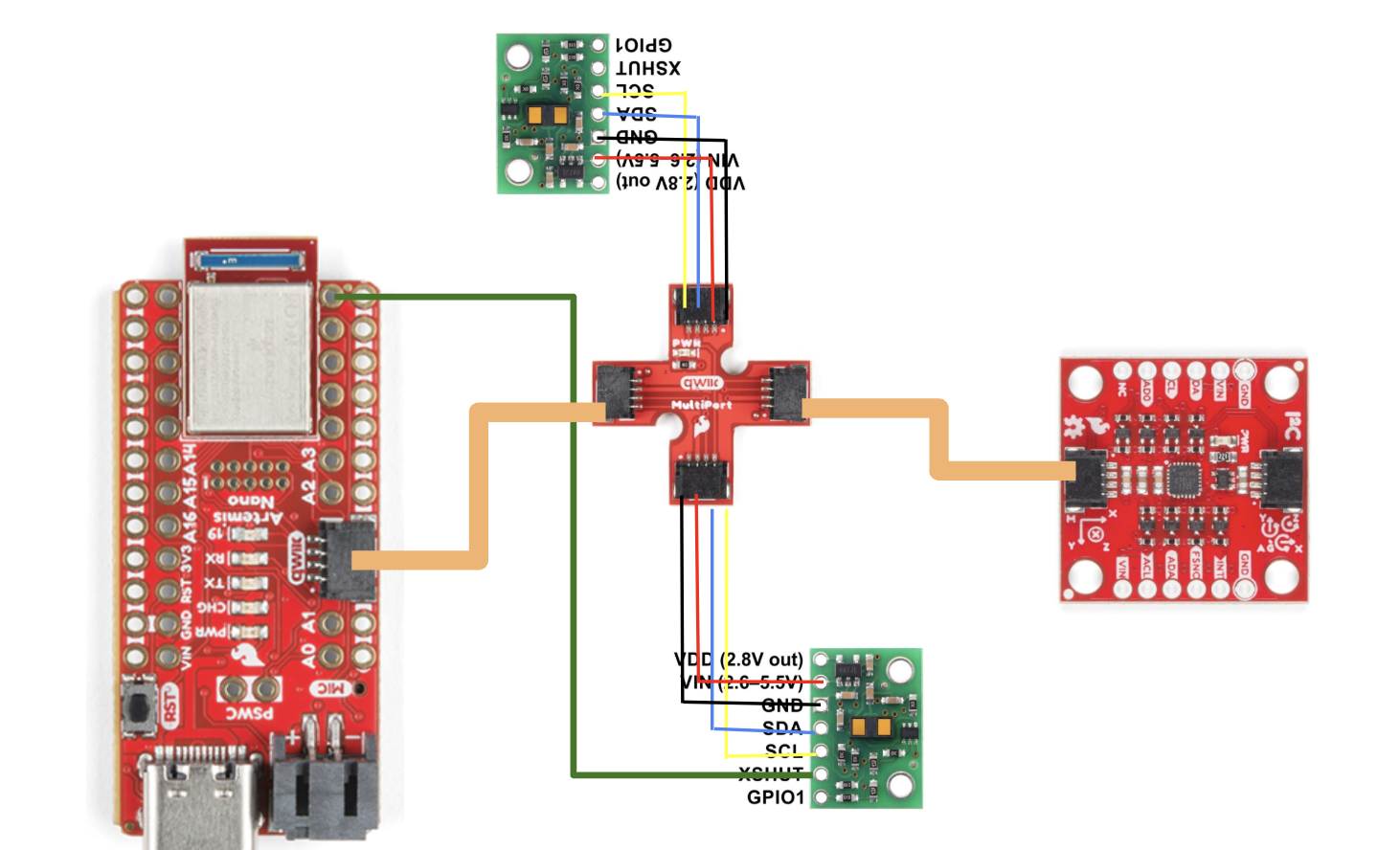
I plan to put both TOFs on the front of my robot. While this may cause it to miss some obstacles to its left and right, I believe that these issues will be mitigated with proper angle control of the robot. When placed in an unfamiliar environment, it can simply do a 360 degree spin to map it out. I believe that interpretation of the sensor data will be easiest with them both in the same location on the robot.
Lab Tasks
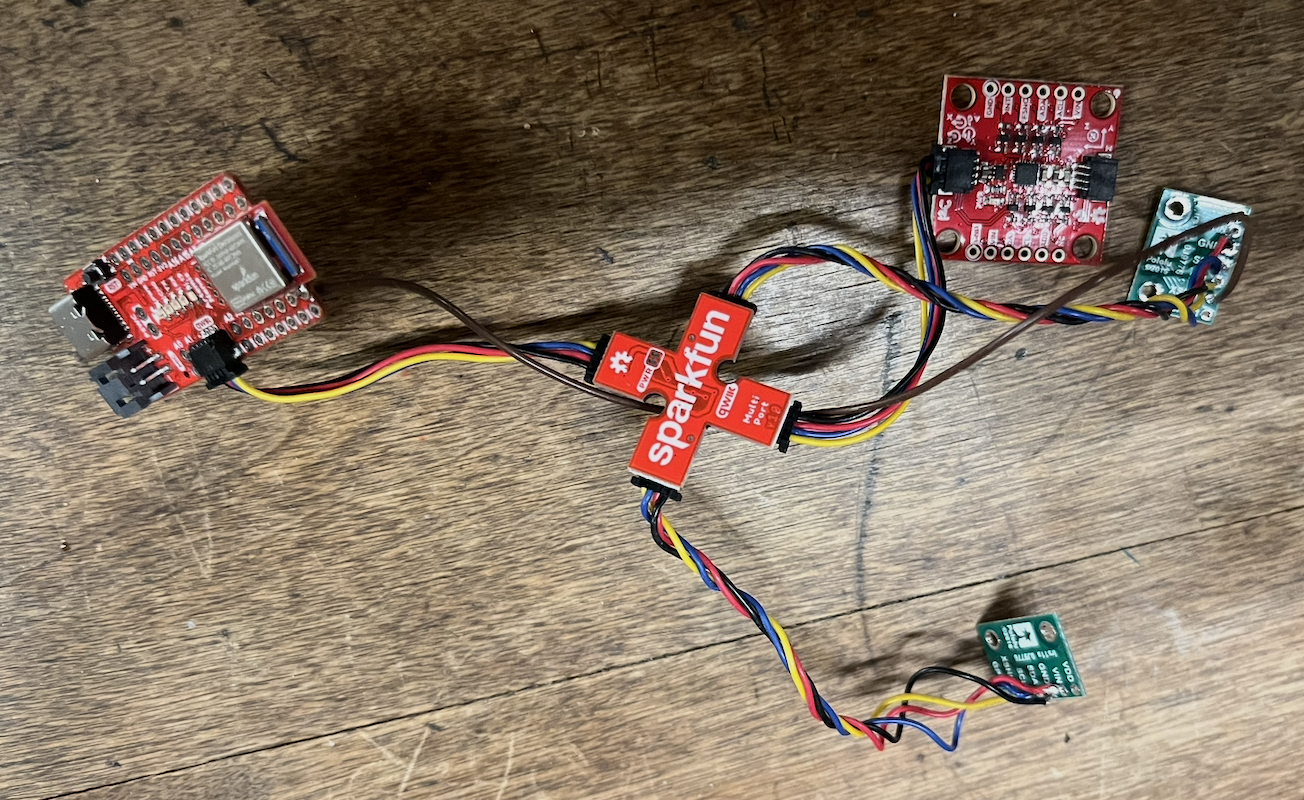
Below, you can see my implementation of this wiring scheme, with a video of the demo I2C scanning code.
Initially, the Artemis reads the default I2C address of the TOF as 0x29 (0b 0010 1001). Because the least significant bit of this address is used to indicate read/write, we can shift it left to obtain the I2C address as printed on the datasheet, 0x52 (0b 0101 0010).
I chose the long mode - The resolution at short distances is still sufficient to avoid collisions, but is better at long (on a room scale) distances where mapping will be more useful.
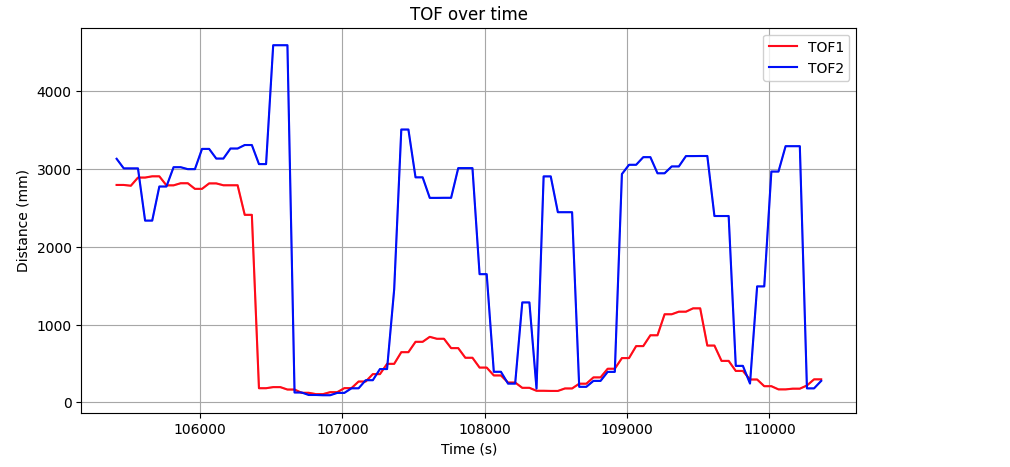
Using two TOFs allowed me to measure differences in performance based on material measured. TOF1 in this case measured my bare hand, while TOF2 measured my matte black jacket sleeve. My hand, the more reflective material, made the TOF much more precise.
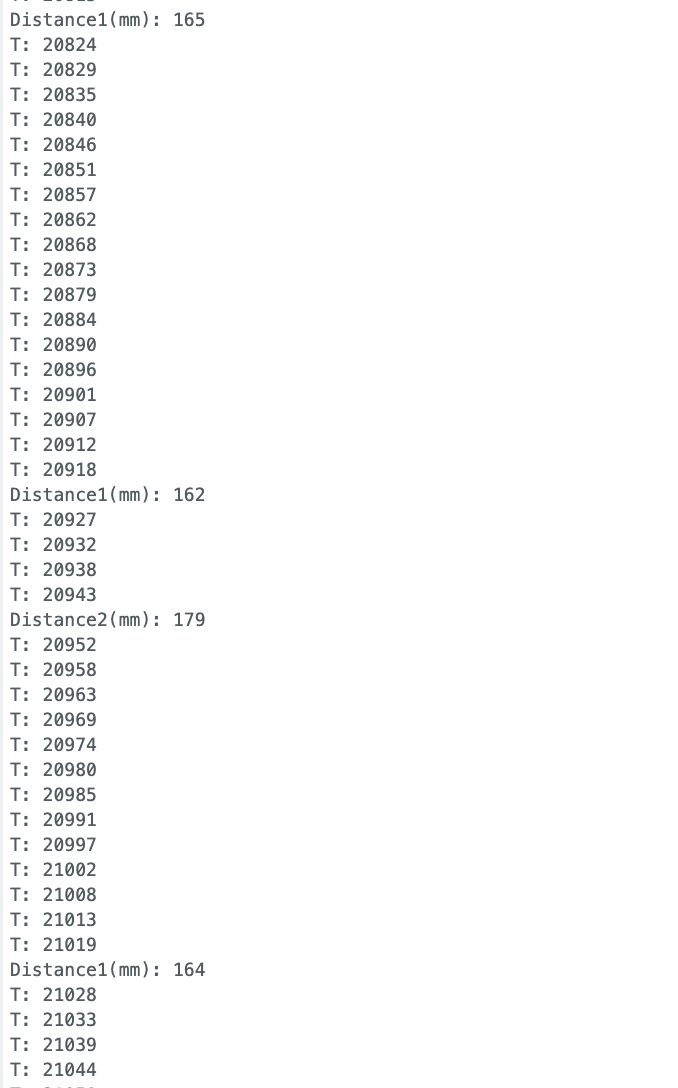
From the below code snippet and output, it's clear that the TOF ready time is the bottleneck in this case. New TOF values ready approximately every 50 ms. However, ranging does add a small delay to the loop in addition to the various serial prints of 1-2 ms.
Output:
I wrote a command RECORD_TOF which grabs 100 values from each TOF sensor and sends via BLE using my existing GET_DATA command.
I generated the following values with the testing setup below: 
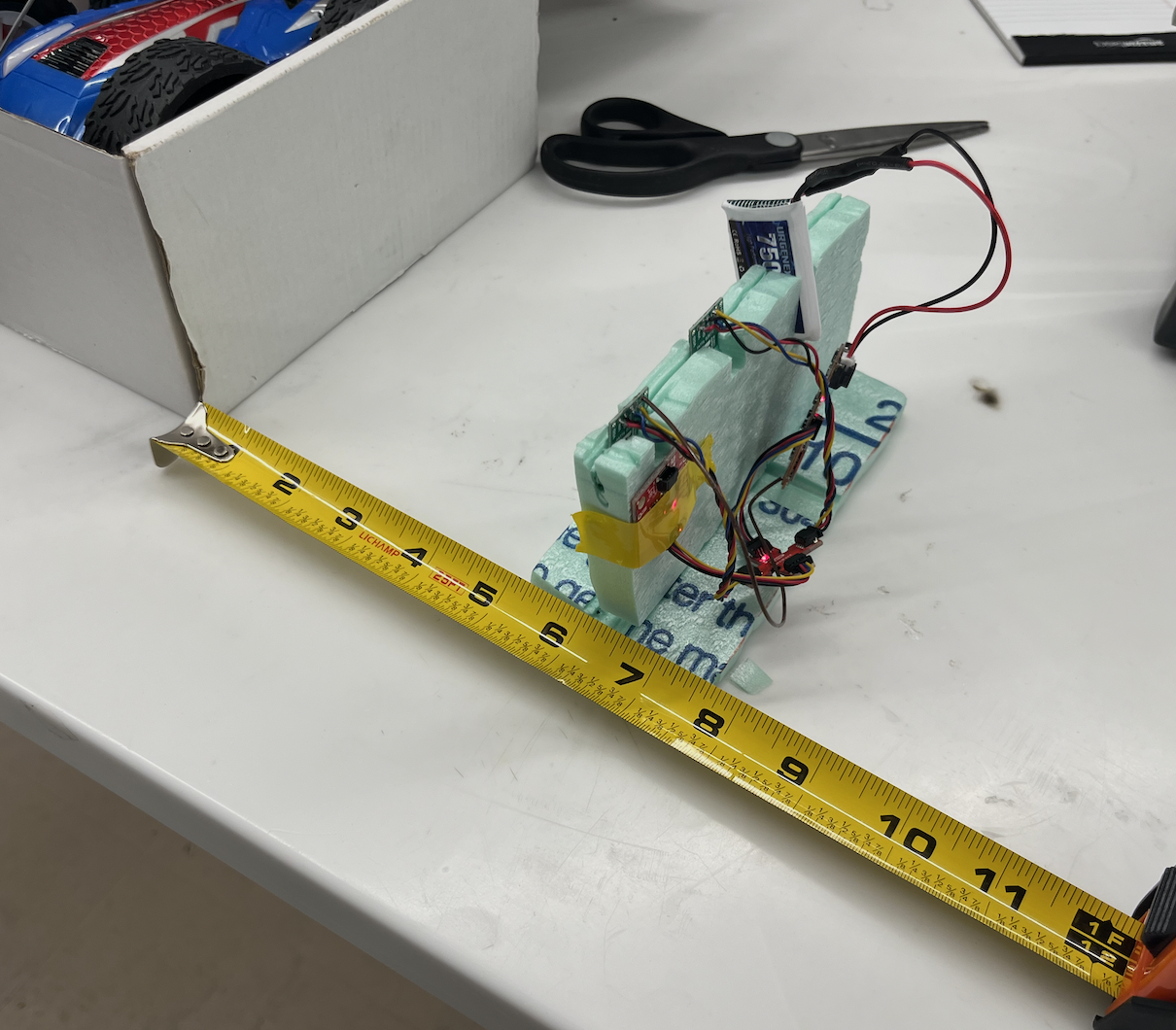
I implemented the TOF recording into my main loop via a record_TOF() function which is called when either of the two TOFs are ready.
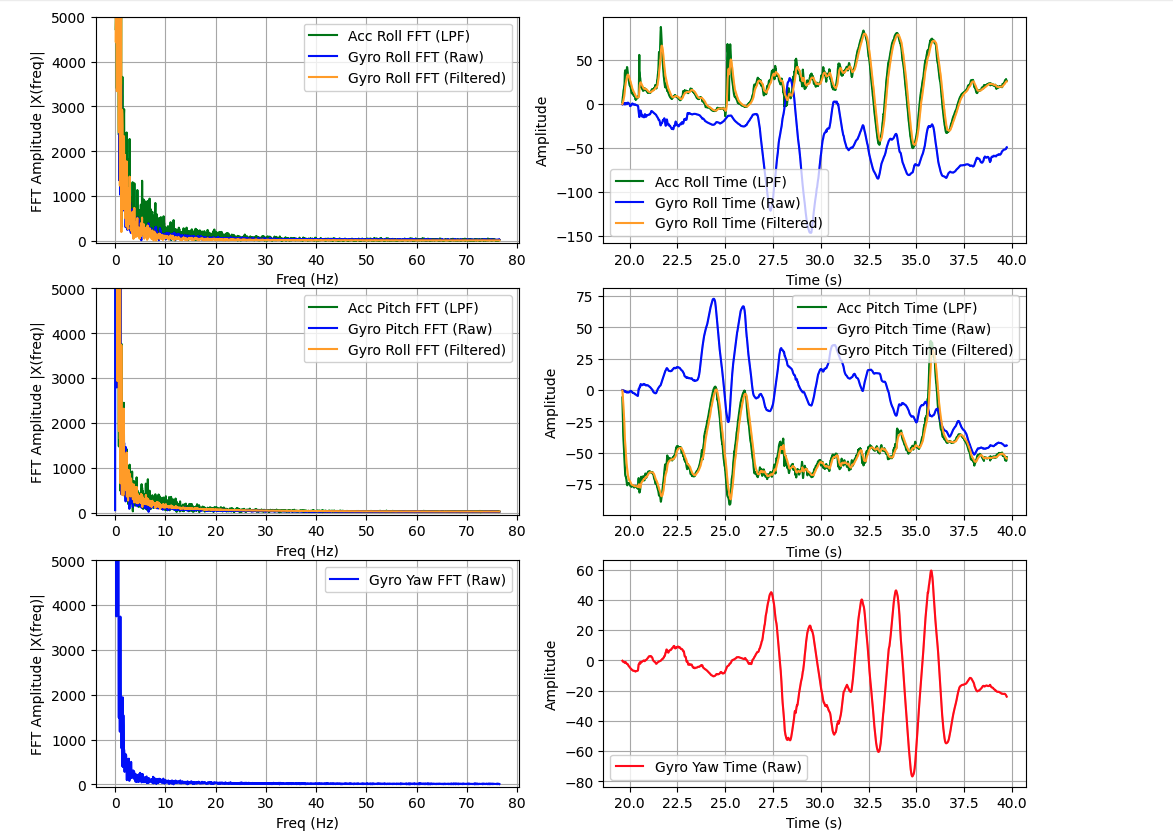
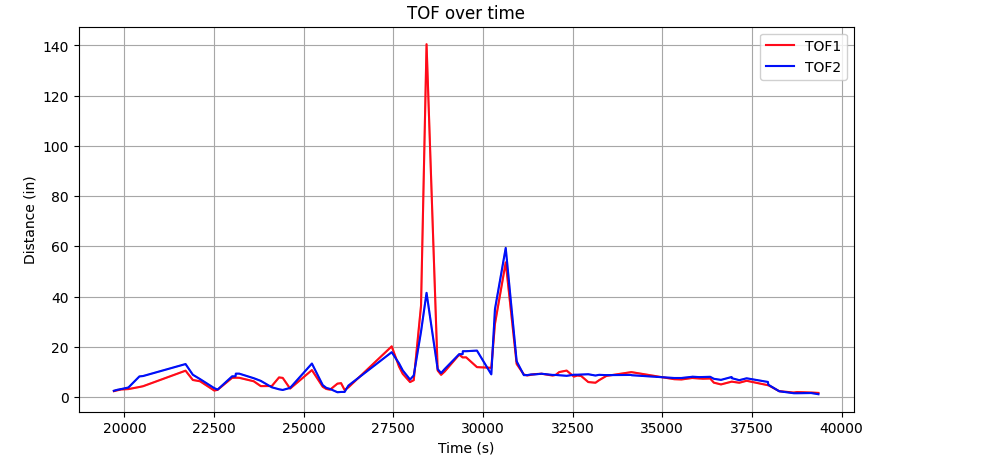
This significantly slowed IMU and TOF data from their standalone tests. The IMU recorded 3079 datapoints in 20 seconds, and the TOF recorded 86, for sample rates of 154Hz and 4.3Hz, respectively. The IMU sample rate is reasonable, but TOF appears too low to be useful -- We want about 10Hz from it. I collected the data below with a series of pitches, rolls, yaws, and oscillations in the z-axis (where TOFs point).
To try and speed up execution, I created two separate lenArrx2 arrays for storing individual TOF data and their timestamps, making my record_TOF() look like this:
THis resulted in even less recorded TOF values -- an average of 56 per TOF per 20 seconds, or 2.8 Hz. Though this seems lower than the last test, the TOFs are likely readying at the same interval and some values were just being double counted before. Still, the sample rate of the TOFs is too low.
Collaborations
I worked with Lucca Correia and Trevor Dales extensively, and referenced Daria's and Mavis' site for multi-TOF operation.