Table of Contents
Previous: Lab 6
Lab Tasks
System Identification
If we approximate the open-loop robot system as first-order with respect to velocity, using Newton's second law to write
$$ F = ma = m\ddot{x} $$
with dynamics
$$ \ddot{x} = \frac{d}{m} \dot{x} + \frac{u}{m} $$
where $d$ and $m$ are lumped-parameter terms to roughly describe the drag (incorporating resistance from the air, ground, and motor dynamics) and intertia (incorporating mostly car mass, but also motor dynamics).
Choosing a state
$$ x = \begin{bmatrix} x \cr \dot{x} \end{bmatrix} $$
we can then describe the open-loop system in state-space form as $$ A = \begin{bmatrix}0 & 1 \cr 0 & -d/m\end{bmatrix} \text{ } B = \begin{bmatrix}0 \cr 1/m\end{bmatrix}. $$
We're only directly measuring the TOF data $x$, so it makes sense for our state-space system to output exclusively the position of the system (relative to a wall). In other words, with transition and output matrices
$$ C = \begin{bmatrix} -1 \cr 0 \end{bmatrix} \text{ } D = \begin{bmatrix}0 \cr 0\end{bmatrix} $$
With a PWM input of 80 (around the center of my applied range in Lab 5), I measured the following open-loop data and applied a low-pass-filter with $\alpha$ = 1 Hz:
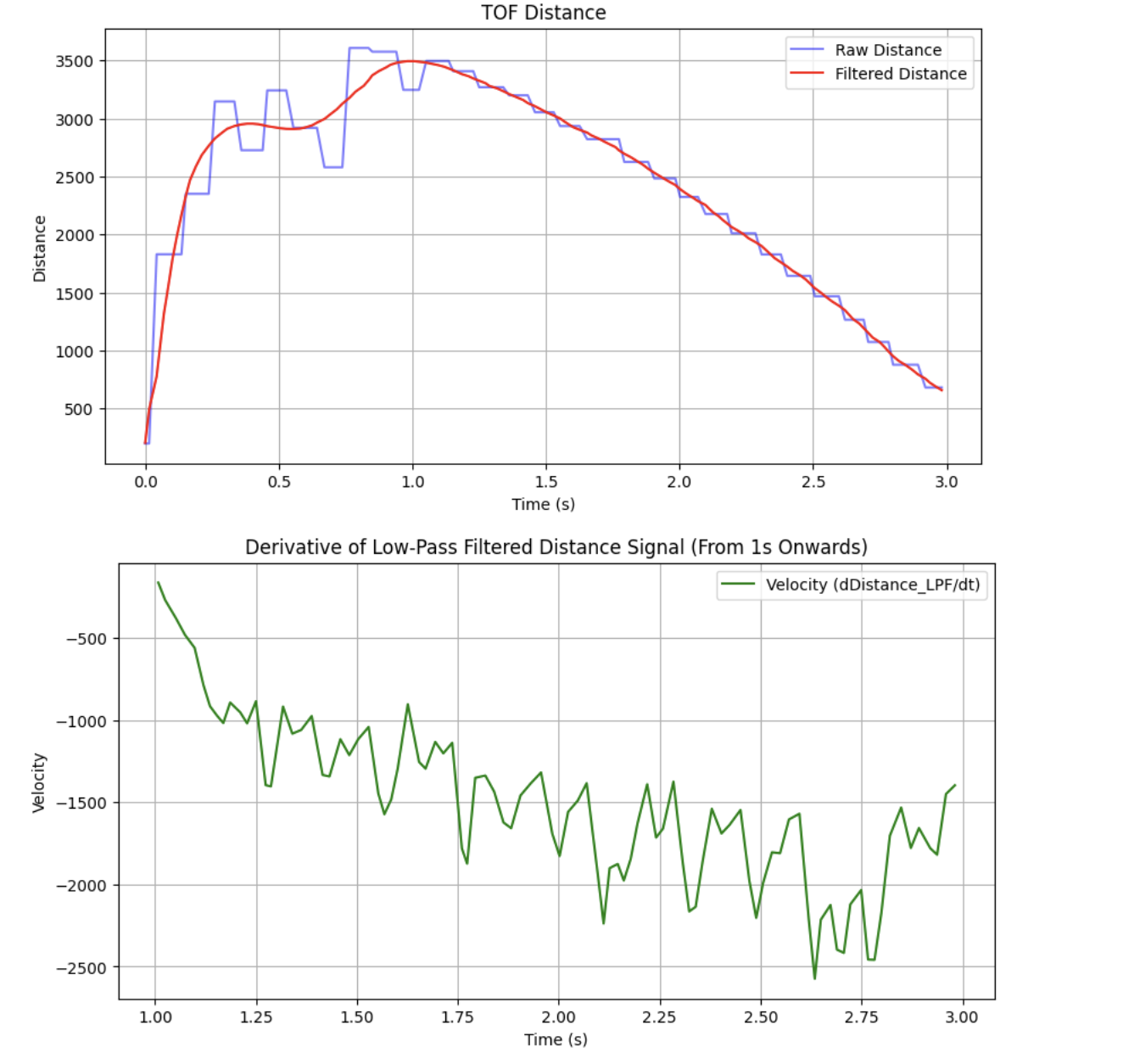
I then applied an exponential fit to the velocity data and marked the steady-state and 90% rise time points.
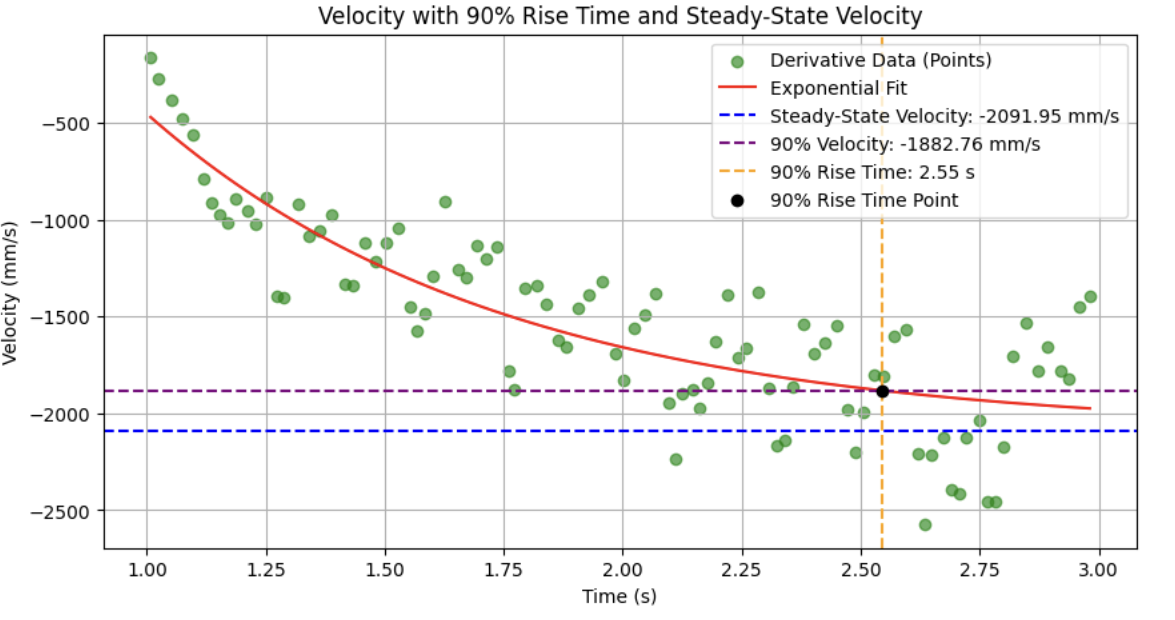
with a steady-state velocity of -2091.5 mm/s $\approx$ -2.09 m/s, and 90% rise time of 2.55 s, and setting u = 1 N (unit input), we have
$$ d = \frac{1 N}{2.09 m/s} = .478 kg/s $$
as our drag parameter, and
$$ m = \frac{.478 kg/s * 2.55 s}{ln(.1)} = .529 kg $$
as our momentum parameter, leading to
$$ A=\begin{bmatrix}0 & 1 \cr 0 & -0.903\end{bmatrix}
$$
and $$ B=\begin{bmatrix}0 \cr 1.75\end{bmatrix} $$
Note: looking back on this, I used too low a speed compared to my maximum for a 90% rise time -- I should've used something like 60%. However, my filter performed well with the above values, so I decided to proceed without going back and modifying A and B.
Kalman Filter Simulation
I get new motor inputs (not necessarily new TOF values ) every 20 ms, so I used that as my Kalman filter timestep.
to get an initial estimate for variances, I used
$$ \sigma_1 = \sigma_2 = \sqrt{\frac{100}{dt}} $$ for the process uncertainty, based on the sample time $dt$ that the system has to deviate from the predicted state, and $$ \sigma_3 = \sqrt{\frac{100}{dx}} $$ for the sensor uncertainty, based on the sensor variance $dx$. In a static test at 2000 mm from a white wall, I measured a variance $dx = 80.9$ mm.
Substituting,
$$ \sigma_1 = \sigma_2 = 70.7 $$ and $$ \sigma_3 = 35.1. $$
I then discretized my matrices according to the above $dt = .02$ s and used the provided kf() to filter my data in Python.
Ad = np.eye(2) + dt * A
Bd = dt * B
x = np.array([[-tof[0]], [0]]) # TOF from collected data
Sigma_u = np.array([[sigma_1**2, 0], [0, sigma_2**2]]) # process noise
Sigma_z = np.array([[sigma_3**2]]) # sensor noise
...
def kf(mu, sigma, u, y):
mu_p = Ad.dot(mu) + Bd.dot(u)
sigma_p = Ad.dot(sigma.dot(Ad.transpose())) + Sigma_u
sigma_m = C.dot(sigma_p.dot(C.transpose())) + Sigma_z
kkf_gain = sigma_p.dot(C.transpose().dot(np.linalg.inv(sigma_m)))
y_m = y - C.dot(mu_p)
mu = mu_p + kkf_gain.dot(y_m)
sigma = (np.eye(2) - kkf_gain.dot(C)).dot(sigma_p)
return mu, sigma
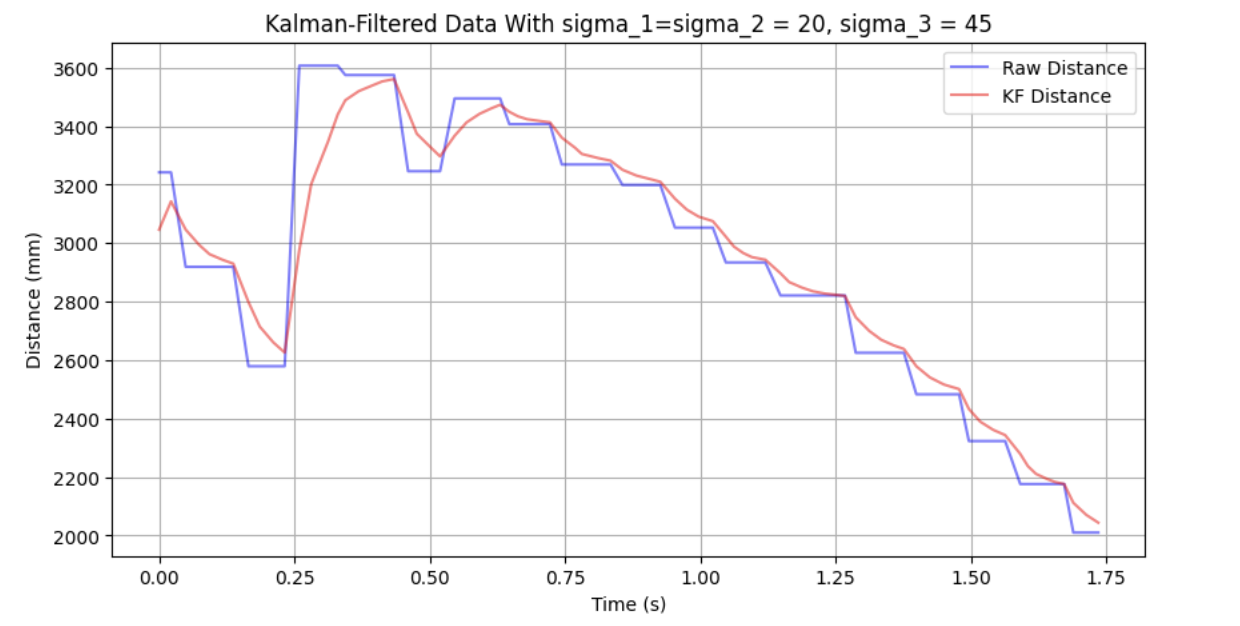
With my process and sensor noise of $\sigma_1 = \sigma_2$ = 70.7 and $\sigma_3$ = 35.1, my filtered data looked like this:
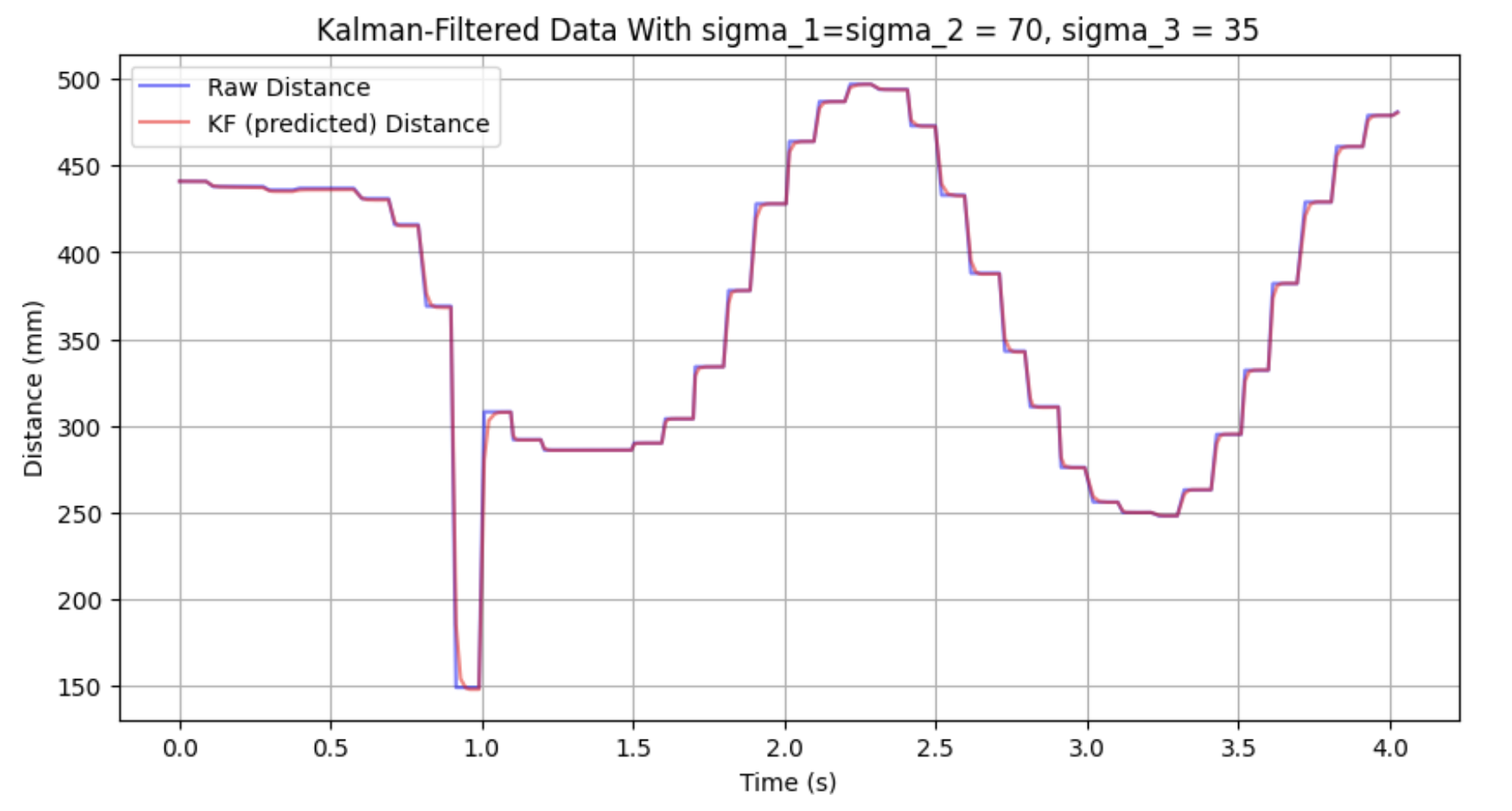
This is a bit tight to the raw data for my taste, Decreasing process noise (i.e. if I become more certain about the model I think my robot operates on, and less certain of my sensor data relative to the model), I get the following:
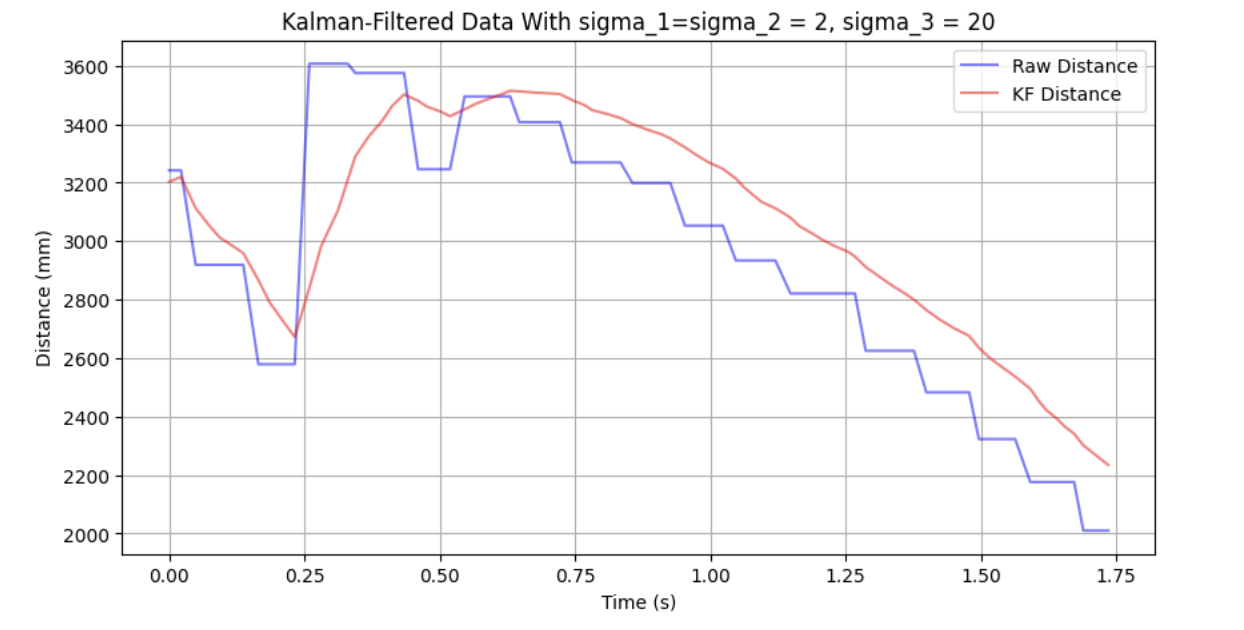
After tweaking the covariances some more, I was able to get the following filtered data, which appears to track the real distance pretty well:
Onboard Kalman Filter
To implement the Kalman filter on my robot, I wrote a function kalman_filter() which uses the BasicLinearAlgebra library for matrix math.
// state, uncertainties, measured val
struct KF_vars {
Matrix<2,1> mu ;
Matrix<2,2> sigma;
};
...
KF_vars kalman_filter(Matrix<2,1> mu, Matrix<2, 2> sigma, Matrix<1,1> u, Matrix<1,1> y){
// PREDICT
Matrix<2,1> mu_p = Ad * (mu) + Bd * (u);
Matrix<2,2> sigma_p = Ad * sigma * ~Ad + sigma_u;
// UPDATE
Matrix<1,1> sigma_m = (C * sigma_p * ~C) + sigma_z;
Matrix<1,1> sigma_m_inv = sigma_m;
Matrix<1,1> sigma_m_inv = {1/sigma_m(0)}; // use scalar inverse instead
Matrix<2,1> kkf_gain = sigma_p * ~C * sigma_m_inv ;
Matrix<1,1> y_m = y - ( C * mu_p);
Matrix<2,1> mu_out = mu_p + kkf_gain * y_m ;
Matrix<2,2> sigma_out = I - kkf_gain * C * sigma_p ;
// FORMAT FOR OUTPUT
KF_vars out;
out.mu = mu_out;
out.sigma = sigma_out;
return out;
}
I didn't use the BasicLinearAlgebra Inverse() function as I found it didn't invert the 1x1 sigma_m correctly. It was pretty simple to just take the scalar inverse, though.
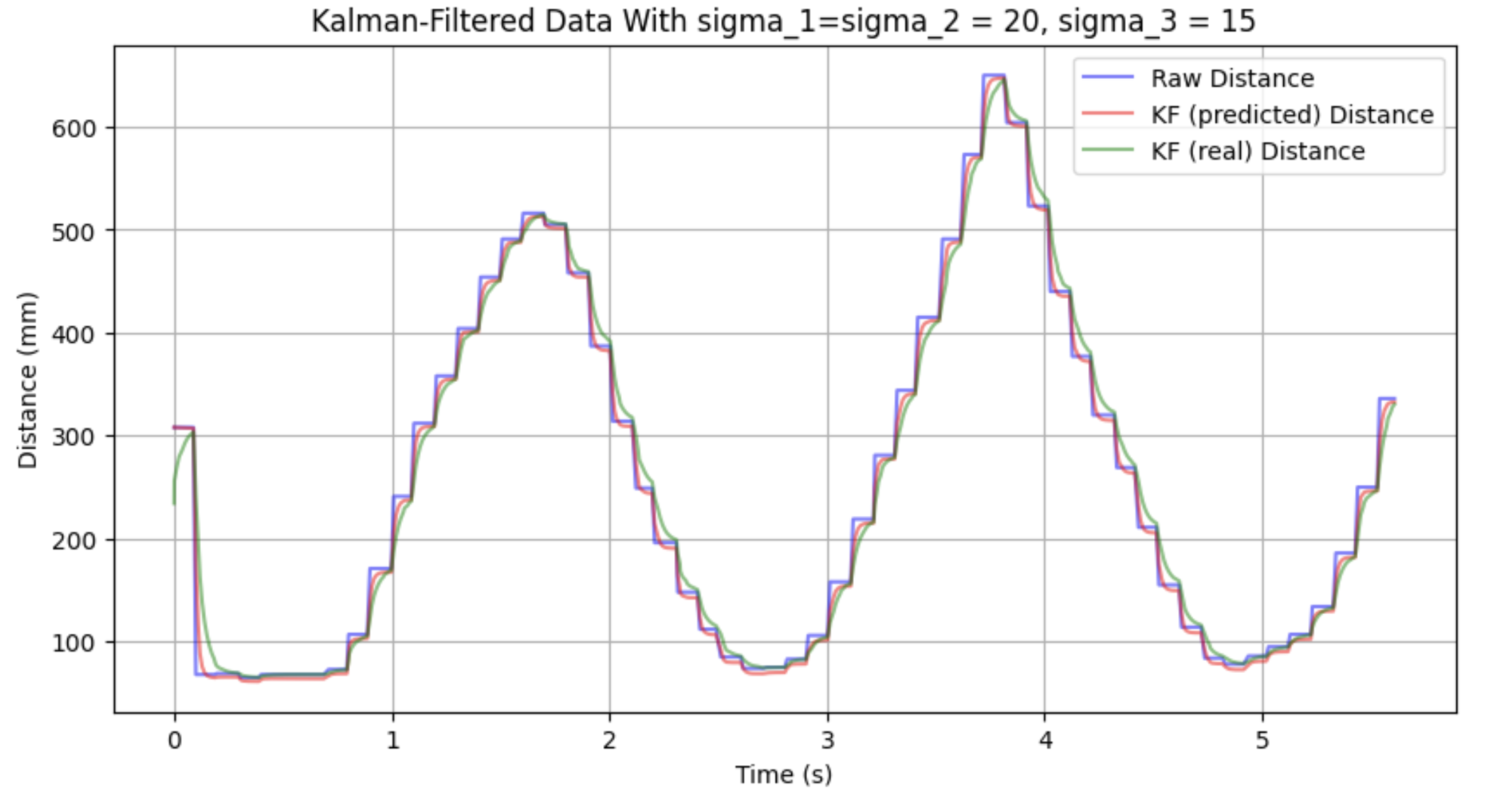
I did some testing on just the TOF (no motor input) and found really promising results with the above uncertanties: 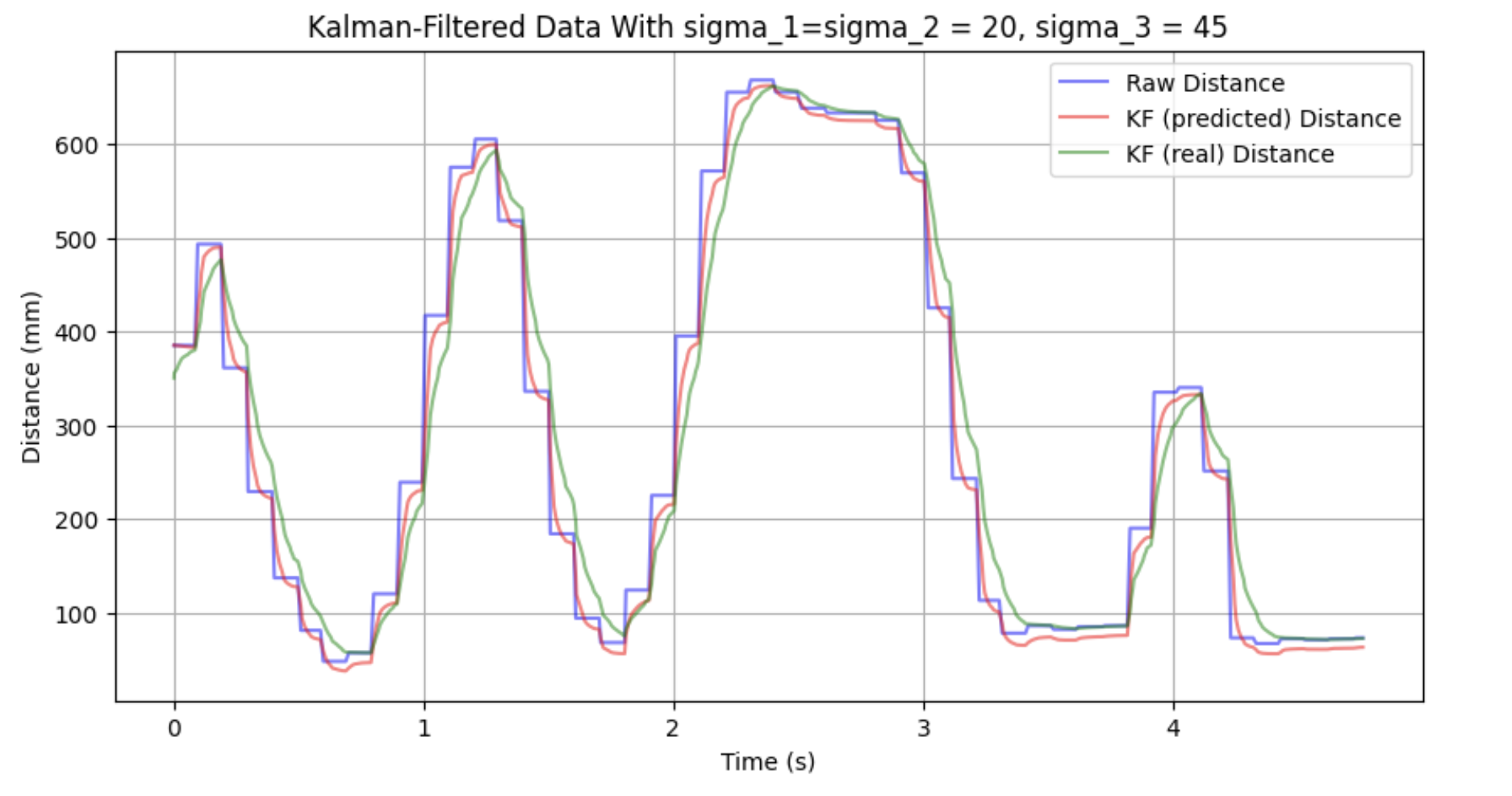
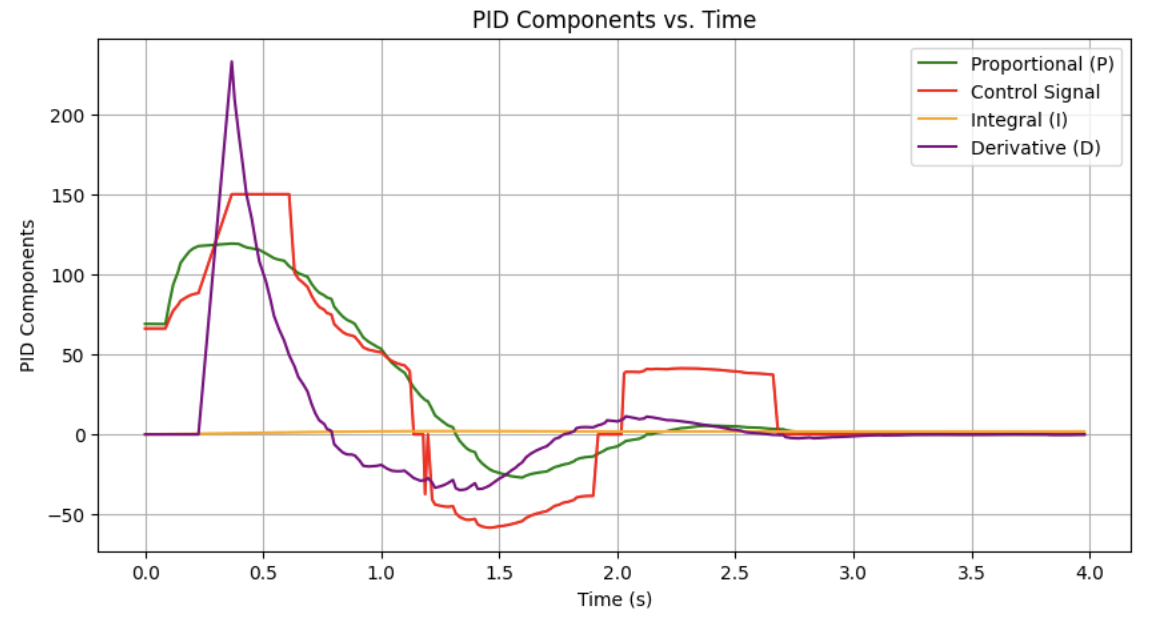
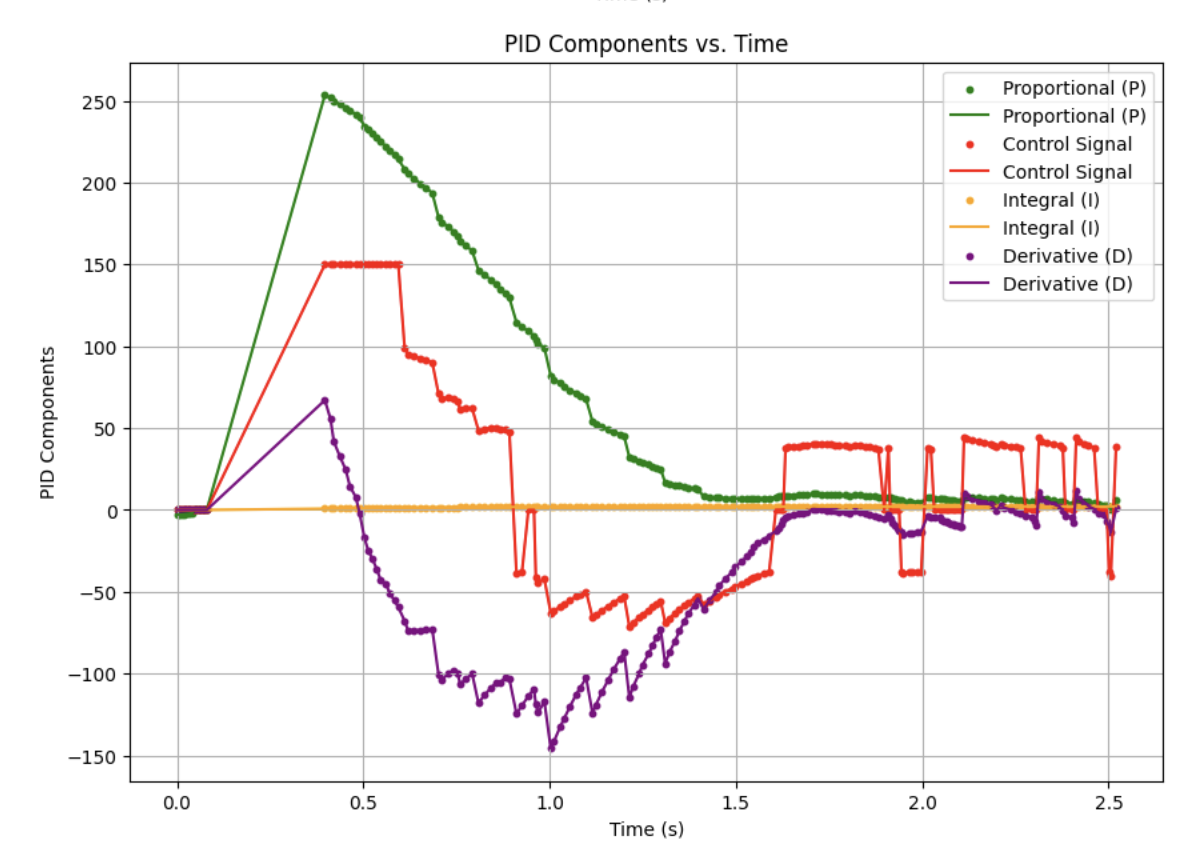
As a sanity check, I tried modifying my gains in a similar manner to the above, and got the following responses: 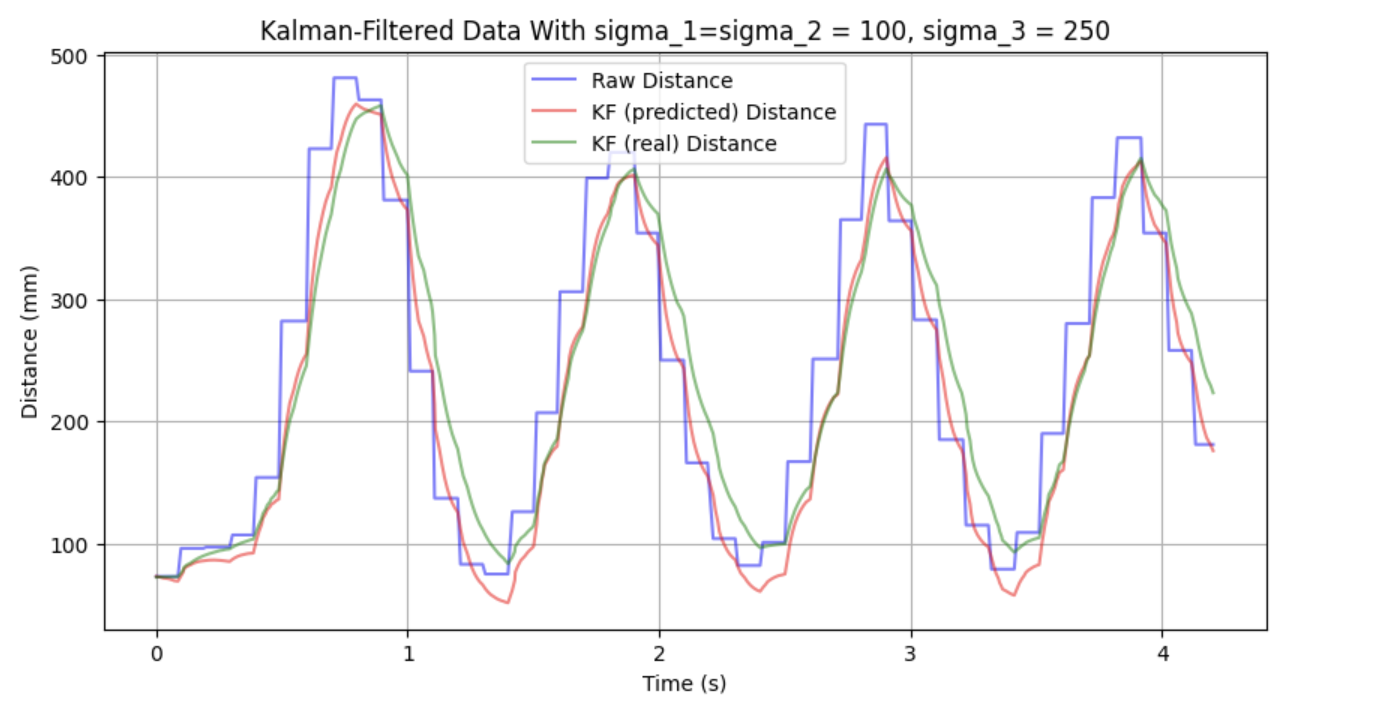
Although there are a few differences between the measured and predicted Kalman filter data, they have similar enough characteristics that I don't think the controller will have any trouble.
This one was a bit heavy on the P gain, but showcases the smoothness of the filter well:
After some tuning, I got the following response:
Note: Fix of the initial TOF zero values coming soon!
Collaborations
I worked with Lucca Correia and Trevor Dales extensively. I used ChatGPT to help with curve fitting and generating nice plots and looked at Stephan's site for some rationale on initial estimates.