Projects.
COMT
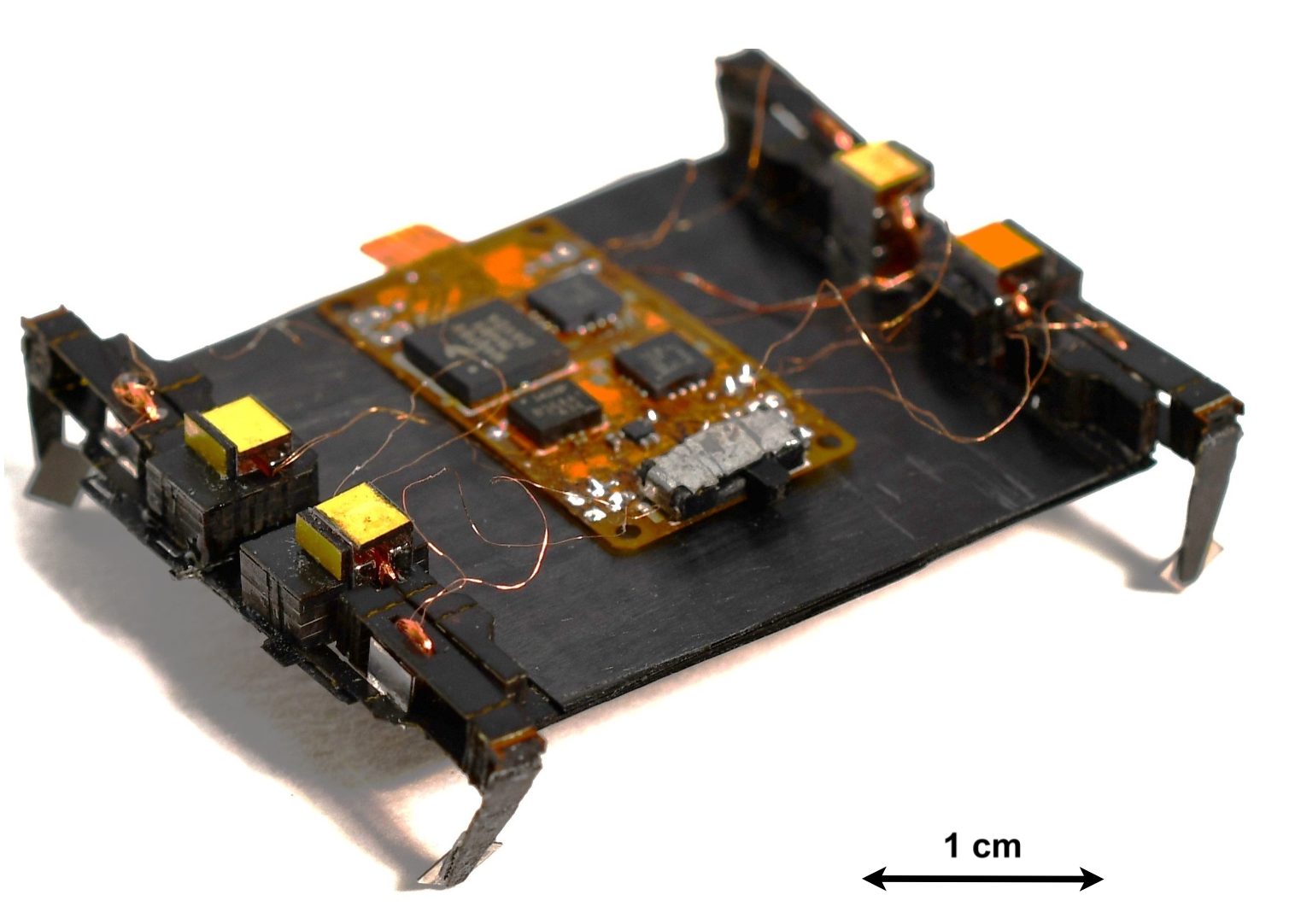
Custom flex PCB and embedded control stack for untethered sensing and closed-loop trajectory control on a 1.5 g quadruped microrobot, through the Helbling Research Laboratory at Cornell.

Coursework
Select course projects from MAE 4190, MAE 4272, and MAE 4300.